在Onshape上繪製漸開線齒輪以及利用參數繪製齒輪
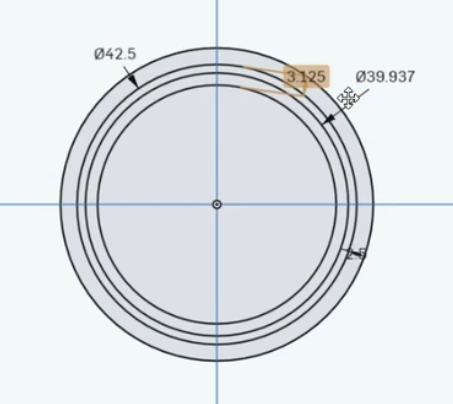
給定模數、齒數及壓力角後,繪製出節圓、齒頂圓、齒根圓及基圓
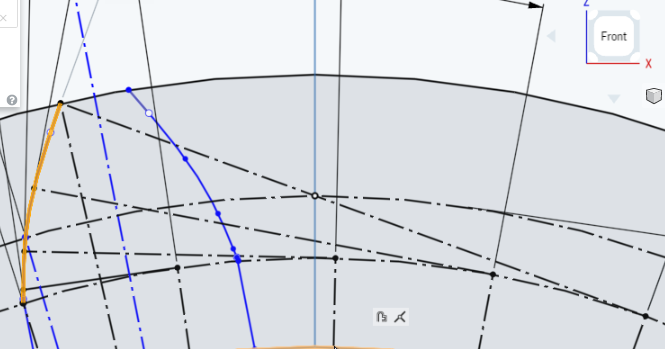
接著從基圓上拉出漸開線,接著繪製到齒根的垂直線,並對稱草圖,即可擠出齒型
接著即可加入參數繪製齒輪,可到老師網誌參考程式碼,亦可搜尋spur的FeatureScript
以下為對應的 FeatureScript 正齒輪輪廓繪圖程式碼:
FeatureScript 581; import(path : "onshape/std/geometry.fs", version : "581.0");annotation { "Feature Type Name" : "Spur2" } export const spur = defineFeature(function(context is Context, id is Id, definition is map) precondition { // 正齒輪齒數, 由使用者輸入, 型別為整數 annotation { "Name" : "Number of Gear Tooth" } isInteger(definition.n, POSITIVE_COUNT_BOUNDS); // 正齒輪模數, 由使用者輸入, 型別為長度, 為內建尺寸單位 annotation { "Name" : "Module" } isLength(definition.module, LENGTH_BOUNDS); // 正齒輪壓力角, 由使用者輸入, 型別為角度, 為內建角度單位 annotation { "Name" : "Pressure Angle" } isAngle(definition.pa, ANGLE_360_BOUNDS); // 正齒輪圓心座標點, 由使用者選擇 annotation { "Name" : "Select a point", "Filter" : EntityType.VERTEX, "MaxNumberOfPicks" : 1 } definition.point is Query; } { // Precondition 中的查詢, 需要 evalue 才能傳回對應的 entity var location = evaluateQuery(context, definition.point)[0]; // location 變數為點座標對應的 entity, 必須透過 evVetexPoint 的評量才能傳回對應的點座標 var center3D = evVertexPoint(context, { "vertex" : location });
// 作圖平面利用 evOwnerSketch 評量, 與 location entity 同一個平面 var sketchPlane = evOwnerSketchPlane(context, { "entity" : location }); // 作圖畫 const gearSketch = newSketchOnPlane(context, id + "gearSketch", { "sketchPlane" : sketchPlane }); // 利用 worldToPlane, 將 center3D 轉換為 sketchPlane 上的平面點座標 const center2D = worldToPlane(sketchPlane, center3D); //print(center2D); // 漸開線近似點數 var imax = 5; // 使用者所選的齒輪圓心 x 座標 var midx = center2D[0]; // 使用者所選的齒輪圓心 y 座標 var midy = center2D[1]; // 齒數 var n = definition.n; // 模數 var m = definition.module; // 壓力角, 單位為角度 var pa = definition.pa; // 齒輪的節圓半徑 var rp = m*n/2; skLineSegment(gearSketch, "line", { "start" : vector(midx,midy), "end" : vector(midx,midy+rp) }); // 齒根 var d = 2.5*rp/n; // 齒頂圓半徑 var ra = rp + m; // 基圓半徑 var rb = rp*cos(pa); //print(rb); // 齒根圓半徑 var rd = rp - d; // 分段後齒頂與齒根半徑差增量 var dr = 0*meter; // 若 rb > rd 時從基圓開始繪製漸開線, 但是若 rd > rb, 則漸開線從 rd 畫到齒頂圓 if (rd > rb) { // 半徑差的分段, 由齒根圓到齒頂圓 dr = (ra-rd)/imax; } else { // 半徑差的分段, 由基圓到齒頂圓 dr = (ra-rb)/imax; } // PI 為實數值沒有單位, tan(pa)也沒有單位, pa 已經設定單位為 degree, 這裡為了與 radian 運算 // 系統會自動轉為 radian var rot = PI/(2*n)*radian; //print(sigma); // 分別用來設定 entity id 用的增量變數 var nameId = 1; var nameId2 = 1; var r = 0*meter; // theta 為浮點數字 var theta = 0; var inv = 0*radian; var inc = 0*radian; // 當 r=rp 時 ,計算 inv_rp 用來旋轉漸開線用 // theta 為沒有單位的實數 theta = sqrt((rp*rp)/(rb*rb)-1); // atan(theta) 為 radian var inv_rp = theta*radian-atan(theta); // 漸開線上點的 x 座標 var xpt = 0*meter; // 漸開線上點的 y 座標 var ypt = 0*meter; // 左側漸開線第1點座標 left first x and y var lfx = 0*meter; var lfy = 0*meter; // 右側漸開線第1點座標 right first x and y var rfx = 0*meter; var rfy = 0*meter; // 左側齒根圓上點座標 left x of dedendum point var lxd = 0*meter; var lyd = 0*meter; // 右側齒根圓上點座標 right x of dedendum point var rxd = 0*meter; var ryd = 0*meter; // 左側齒根圓上點座標 right x of dedendum point (advanced) var lxd_ad = 0*meter; var lyd_ad = 0*meter; var inc_ad = 0*radian; for (var j=0;j<n;j+=1) { // 當 j 增量時, 按照齒數輪廓繞行旋轉增量角度 inc = (2.*j*PI/n)*radian; inc_ad = (2.*(j+1)*PI/n)*radian; if (rd>rb) { // 當齒根半徑因為齒數增多後大於基圓半徑時, 漸開線從齒根圓長起 theta = sqrt((rd*rd)/(rb*rb)-1.); inv = theta*radian-atan(theta); // 左側漸開線第1點座標 // 左側輪廓線配合逆時針旋轉 inc 角度 lfx = midx+rd*sin(inv-rot-inv_rp+inc); lfy = midy+rd*cos(inv-rot-inv_rp+inc); lxd = lfx; lyd = lfy; lxd_ad = midx+rd*sin(inv-rot-inv_rp+inc_ad); lyd_ad = midy+rd*cos(inv-rot-inv_rp+inc_ad); // 右側漸開線第1點座標 // 右側輪廓線配合順時針旋轉 inc 角度 rfx = midx-rd*sin(inv-rot-inv_rp-inc); rfy = midy+rd*cos(inv-rot-inv_rp-inc); rxd = rfx; ryd = rfy; // 齒根圓上的直線 on dedendum points skLineSegment(gearSketch, "line_dd" ~ nameId, { "start" : vector(rxd,ryd), "end" : vector((lxd_ad),(lyd_ad)) }); } else { // 當基圓半徑大於齒根圓時, 漸開線從基圓長起 theta = sqrt((rb*rb)/(rb*rb)-1.); inv = theta*radian-atan(theta); // 左側漸開線第1點座標 lfx = midx+rb*sin(inv-rot-inv_rp+inc); lfy = midy+rb*cos(inv-rot-inv_rp+inc); lxd = midx+rd*sin(inv-rot-inv_rp+inc); lyd = midy+rd*cos(inv-rot-inv_rp+inc); lxd_ad = midx+rd*sin(inv-rot-inv_rp+inc_ad); lyd_ad = midy+rd*cos(inv-rot-inv_rp+inc_ad); // 從基圓點到齒根圓點, 畫直線 left from base point to dedendum point skLineSegment(gearSketch, "line_lbd" ~ nameId, { "start" : vector(lfx,lfy), "end" : vector((lxd),(lyd)) }); // 右側漸開線第1點座標 rfx = midx-rb*sin(inv-rot-inv_rp-inc); rfy = midy+rb*cos(inv-rot-inv_rp-inc); rxd = midx-rd*sin(inv-rot-inv_rp-inc); ryd = midy+rd*cos(inv-rot-inv_rp-inc); // 從基圓點到齒根圓點, 畫直線 right from base point to dedendum point skLineSegment(gearSketch, "line_rbd" ~ nameId, { "start" : vector(rfx,rfy), "end" : vector((rxd),(ryd)) }); // 齒根圓上的直線 on dedendum points skLineSegment(gearSketch, "line_dd" ~ nameId, { "start" : vector(rxd,ryd), "end" : vector((lxd_ad),(lyd_ad)) }); } for (var i=1; i<imax+1; i+= 1) { // 先處理中線左側的漸開線 // 當 rd 大於 rb 時, 漸開線並非畫至 rb, 而是 rd if (rd>rb) { r = rd+i*dr; } else { r = rb+i*dr; } theta = sqrt((r*r)/(rb*rb)-1); var inv = theta*radian-atan(theta); // 漸開線上的點座標 xpt = midx+r*sin(inv-rot-inv_rp+inc); ypt = midy+r*cos(inv-rot-inv_rp+inc); // lxd, lyd 為漸開線上的繪線起點座標 skLineSegment(gearSketch, "lineb" ~ nameId, { "start" : vector(lfx,lfy), "end" : vector((xpt),(ypt)) }); // 更新漸開線點座標 lfx = xpt; lfy = ypt; nameId += 1; } // 紀錄左側漸開線的最後一點, 也就是齒頂圓上的點座標 var lastlx = xpt; var lastly = ypt; // another side for (var i=1; i<imax+1; i+= 1) { if (rd>rb) { r = rd+i*dr; } else { r = rb+i*dr; } theta = sqrt((r*r)/(rb*rb)-1); var inv = theta*radian-atan(theta); // 漸開線上的點座標 xpt = midx-r*sin(inv-rot-inv_rp-inc); ypt = midy+r*cos(inv-rot-inv_rp-inc); // rxd, ryd 為漸開線上的繪線起點座標 skLineSegment(gearSketch, "linec" ~ nameId, { "start" : vector(rfx,rfy), "end" : vector((xpt),(ypt)) }); // 更新漸開線點座標 rfx = xpt; rfy = ypt; nameId += 1; } var lastrx = xpt; var lastry = ypt; // 齒頂連線 skLineSegment(gearSketch, "lined" ~ nameId2, { "start" : vector(lastlx,lastly), "end" : vector(lastrx,lastry) }); nameId2 += 1; } skSolve(gearSketch); });
注意事項
1.當齒根半徑因為齒數增多後大於基圓半徑時, 漸開線從齒根圓長起
2.當基圓半徑大於齒根圓時, 漸開線從基圓長起
零件連結 :Onshape齒輪
練習影片
40423245機械設計工程系 - 協同產品設計實習課程W12-在Onshape上繪製漸開線齒輪 from 40423245 on Vimeo.
40423245機械設計工程系 - 協同產品設計實習課程W12-利用參數繪製齒輪 from 40423245 on Vimeo.