第十六週上課進度
根據 http://chiamingyen.github.io/kmolab_data/files/ProEMechanism.pdf 說明完成零件繪製與組立後, 如何精確得知機構運動過程的約束位置?
計算 Piston 不發生干涉的有效行程, 可採如下方法:
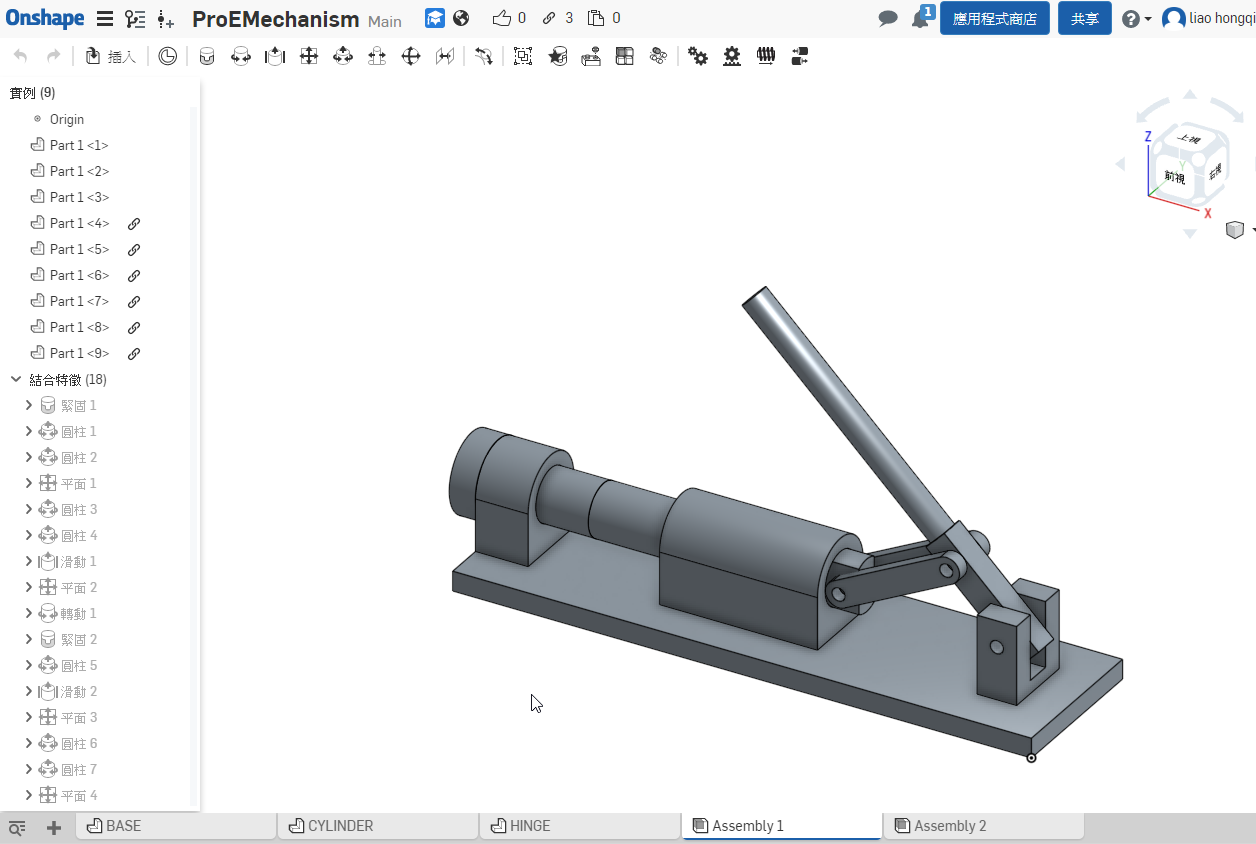
1.實際利用 Onshape 中的組立, 移動 piston 零件, 靠目測概略決定 piston 的有效行程. (目測法, 只能得到大概的行程範圍)
2.利用 Solvespace 繪製 2D 約束圖, 然後利用約束點在線或圓上的方式,以圖解法解出有效行程, 如下圖一, 圖二與圖三所示. (圖解法, 利用 Solvespace 既有的約束條件設定完成計算)
3.利用 Jupyter 與 Python3 的 sympy 模組, 先進行符號式推導, 然後再利用數值分析解出 piston 的有效行程, 機構各點標示如下圖四所示, 計算出的 theta 轉角為 105.7, 如下圖五所示. (以自行編寫的 sympy 程式解題, 透過 Jupyterhub 可以有效進行協同設計運算)
4.除了上述的目測, 圖解與符號式結合數值分析法之外, 也可以採用基因演算法解題, 計算出的 theta 轉角為 105.7, 如下圖六所示. (利用演化法解題, 可以在單機運算, 也可以在 Jupyterhub 平台上進行運算)
第一種方法跟第四種方法我們較不採用,第一種方法太過於不準確,第四種方法較過於艱深,因此我們這禮拜要學習的是第二種跟第三種方法,可至2015 Fall CADP 的第16週上觀看解釋
心得:我們這一組在繪製Onshape的零件時,有分配一些零件給不同的組員繪製,也學習到該怎麼在Onshape上協同的一些基礎。
第十六週影片
2016 Fallcadp W16 from 40423245 on Vimeo.